Fig. 2
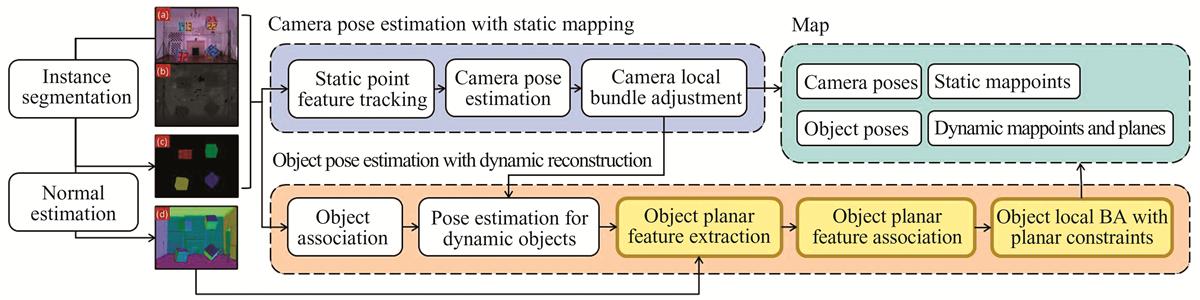
Overview of the OP-SLAM system
Download original image
Note: The framework of the OP-SLAM system is composed two core modules: camera pose estimation with static mapping, and object pose estimation with dynamic reconstruction. The system integrates these processes to generate a map. The subfigures in the diagram represent the data used:
(a) RGB image, (b) depth image, (c) segmentation mask, and (d) normal image.
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.